Велосипед-альтернатива.бесколесный, необычный, по тому же и/или другому назначению. |
Как говорится, не изобретайте велосипед. Может быть и так. В общем, может оказаться, и наоборот. Это дело такое, что может быть, в частности, не безуспешным и как-то продолжаться.
Важно другое.
Мы зациклились на круглых колесах. В некоторых прежних разработках было
показано, что колесо, извините, это самый худший макет и вариант движения. Оно
вобрало в себя и соединило собой сотню каких-то ног, прикрепленных к центральной
оси. Действует из них на колесе только одна, а все другие в режиме ожидания
вращаются впустую по окружности. Можно показать, что колесо это сотни ненужных
ног.
Для
чего нам эти застрявшие в зубах "кругляшки"? В природе успешно работают одна -
две - четыре ноги, - и достаточно.
Велосипед должен не ехать, опираясь на круглые колеса, прокручивающие весь периметр, пока не не подойдет очередная точка контакта с опорой. Велосипед должен бежать (почти как человек!), перебирая ногами (что самое лучшее!). И придется (пока!) велосипедные ноги расположить искусственно вдоль линии движения, хотя это вовсе не обязательно. Расположив их по другому, то есть как обычно, справа и слева, получим экстра-вело, - скорее посмотрите рис. 4 (он в конце описания, чтобы поразить Ваше и мое воображение). Но не о нем здесь речь. Здесь будет попроще.
Здесь будет
описание того велосипеда, к которому мы привыкли, только вместо каждого колеса у
него появятся две ноги. В этом случае переоборудование окажется наиболее
простым. Его привод будет тем же - от ног человека на нем сидящего. При этом
произойдет преобразование движения ног и усилий мышц в усилия искусственных
ног-опор велосипеда. Только и всего. Для того, чтобы просто увеличить скорость
движения, например, по ровной поверхности. Как это происходит в обычном
велосипеде. Сделать такое, такой велосипед с ногами - совсем просто.
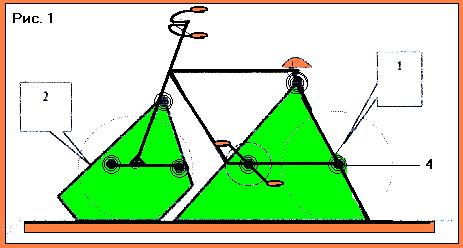
Посмотрите на него.
Он представлен на рис. 1.
Колес нет, они сняты, от них остался и показан только их контур. Все другое, велосипедное, есть: рама, руль, седло, педали. Вместо колес установлены передние и задние ноги, так называемые опорно-двигательные аппараты. Они составлены из двух параллельных пластин. Форма пластин любая, лишь бы получить опору снизу, и укрепить пластины на трех осях, не расположенных на одной линии (например, как показано на рис. 1, вид сбоку). Этот вид нового велосипеда необычен, потому что не привыкли.
По сути эти передние и задние ноги нужно расположить справа и слева, седло между ними (что не обязательно) и человека там же, опирающегося ногами на две педали. Вот и всё. Велосипед превратится в совсем необычное создание. Ему не нужны будут руль, рама, устойчивость обеспечивается - просто это будет механизм преобразования движения ног человека в движение искусственных движущихся опор. Только и всего. Сейчас, в настоящем велосипеде все это скрыто.
Итак, что же такое искусственные ноги? Их вид сбоку и в поперечном разрезе показан на рис. 2.

Нужно ли
что-то объяснять? Видно, что две треугольные пластины расположены параллельно
друг другу. Они соединены между собой в трех шарнирных точках. Их соединение -
это противофазные кривошипы с центральным валом. Один вал крепится в подшипниках
каретки, там где раньше был вал педалей. Справа и слева на вал устанавливаются
педали. Они окажутся теперь по бокам треугольных пластин.
Второй вал (вместе с
пластинами) укрепляется относительно задней вилки, его ось помещается там, где
раньше была ось заднего колеса. Третий вал (верхний) устанавливается на раме под
седлом.
Таким образом, вместо заднего колеса теперь установлен опорно-двигательный
аппарат. Он для удобства достаточно плоский, его поперечный размер определяется
расстоянием между правой и левой педалью.
Можно представить, что
рама велосипеда содержит три втулки, расположенные так же, как три оси
кривошипов, тогда сборка велосипеда будет заключаться в том, что валы
опорно-двигательного аппарата (собранного отдельно) вставляются в эти три втулки
и закрепляются на них.
Опорная
поверхность, соприкасающаяся с поверхностью дороги, может быть любой. Она
может содержать пневмо-пружинную поверхность, резинистую, надувную или твердую,
как угодно, в зависимости от модификации.
Вращающееся колесо и
связанные с ним проблемы, кинематические, конструктивные и эксплуатационные, и
путь в тупик, исчезли. Надо же было так! Появляются новые возможности.
На рис. 3 узел кривошипа показан более подробно. Там обозначено: 1 - правый опорный элемент, 2 - левый опорный элемент, 3 - кривошип левого опорного элемента (такой же кривошип на правом опорном элементе - здесь не обозначен), 4 - ось вращения кривошипов, 5 - опорная поверхность левого опорного элемента - см. рис. 2, 6 - опорные подшипники, 7 - опорная поверхность дороги.

Однако –
вернемся к велосипеду.
Он всепогодный, для
лета и зимы. «Идет» по любым летним дорожкам и по снегу зимой, по лыжне, также –
по воде, болоту, траве. У него (пока что) все обычное, кроме колес.
Действует он
так. В определенный момент левый опорный элемент опущен на поверхность
дороги,
а правый – поднят и поверхности дороги не
касается. Все три кривошипных вала совершенно одинаковые. Поэтому при их
вращении (при приводе только на один из них) опорные элементы совершают
поступательное движение по окружности с радиусом, равным эксцентриситету.
Причем, поскольку три "точки" осей кривошипов не лежат на одной прямой, в
поступательном движении пластин нет мертвых зон. Достаточно вращать только один
кривошипный вал, два других получат синфазное с первым вращение. Опорные
пластины в своем движении хорошо балансируются. Их опорные поверхности (как и
все другие их поверхности) получают «шажковое» перемещение, когда то одна
опорная поверхность, то другая соприкасаются с поверхностью дороги. Вследствие
этого весь опорно-двигательный аппарат двигается вперед и увлекает за собой весь
велосипед.
Величина шага
равна двум радиусам эксцентриситета. Эти радиусы могут быть достаточно малы,
однако, если скорость вращения кривошипных валов большая, скорость движения
велосипеда оказывается «в пределах той нормы, к которой привыкли
велосипедисты».
Эксцентриситет
кривошипов может быть любой. Если он увеличивается, растет величина шага и
скорость движения, однако, при этом растут вертикальные колебания опорных
подшипников и связанной с ними рамы велосипеда. Конструктивные подробности
обеспечения демпфирования колебаний здесь не рассматриваются. Они достаточно
известны.
С
одним из кривошипных валов связан привод, например, педальный. Требование
относительно большой скорости вращения кривошипов выполняется при помощи
повышающей передачи от вала педалей к кривошипному валу. Поскольку ввод вращения
к опорно-двигательному аппарату может производиться в любом месте
«треугольника», ось педалей устанавливается в удобном месте, «под ногами»
велосипедиста. Таким образом, отпадает надобность в цепной передаче.
Высокоскоростные
кривошипные валы хорошо «стыкуются» с приводами к ним от электродвигателей,
напрямую, без промежуточных передач. При этом усилие на опорной поверхности
развивается в зависимости от момента на валу электродигателя, разделенного на
величину эксцентриситета.
Так, например, макет
опорно-двигательного аппарата с эксцентриситетом кривошипа, равным 0,3 мм (!)
включал в себя электродвигатель с номинальной скоростью вращения 8000 об/мин.
При включении электродвигателя движение пластин было почти незаметным, ощущался
только легкий шорох. Однако, поместив макет на ровную поверхность, можно было
наблюдать его движение, причем на первый взгляд было не совсем понятно, почему
так происходит, так как казалось, что плоское самостоятельно не должно катится
(двигаться) по плоскому.
Очень эффектно! При этом
одновременно шло преобразование очень высокой скорости электродвигателя в
достаточно низкую скорость движения (без каких бы то ни было замедляющих
передач). В этом случае аппарат легко шел по горизонтальной поверхности, а также
по наклонной плоскости вверх.
До сих пор
такой велосипед в натуральную величину не построен. Однако новое в нем - это
кривошипный опорно-двигательный аппарат, содержащий две одинаковые опорные
платины и три кривошина. Материал пластин - обычные листы фанеры. Кривошипы
должны быть выточены из стали и установлены на подшипниках относительно опорных
пластин и рамы велосипеда.
Ранее один оборот вала
педалей (при соответствующем усилии) приводил к получению движения заднего
колеса на расстояние S м. Если принять эксцентриситет кривошина равным 1 см, за
один его оборот создается порция перемещения опорных пластин на 2 см. Тогда для
продвижения на S м потребуется N оборотов кривошипа, определенных
как N = S/2. Например, S = 2 м, тогда N = 200/2 = 100 оборотов, или N =
200/5 = 40 оборотов соответственно.
Нужно отметить, что на
большой скорости "тряска" рамы почти незаметна, так как работа
опорно-двигательного аппарата такова, что она как бы скрывает вертикальные
амплитуды колебаний, так как форма траектории сглаженная.
И все-таки от
привычной формы велосипеда придется уйти. Когда были круглые колеса,
он получался такой, как сейчас. Все было от них, родимых.
Привязались!
Ось, обод, спицы - все наносное. Приходилось располагать их вдоль линии пути - а
где Вы видели, что так бывает в природе?
Посмотрите на свои
ноги - они справа и слева, - самая лучшая конструкция и любимое
расположение.
Так же делаем и в велосипеде:
ставим его ноги справа и слева, сами себя помещаем в середине, давим на
педали и... от ног естественных передаем движение к ногам искусственным! Только
и всего. Получаем ВЕЛО - СИПЕД. Новый, настоящий, удобный!
Можно стоять, можно сидеть,
даже лежать - кому-что нравится. Главное - на нем можно двигаться с ветерком за
счет своих собственных сил, можно многое другое, без других затрат или вместе с
ними, на бензине, на керосине, электричестве, на сжатом воздухе, на мускулах. На
чем хотите.
Можете даже летать, если на правый и левый аппараты укрепите горизонтальные
пластины. Они в движении помогут подняться в воздух, если сил хватит.
Не
усовершенствованный макет (принцип) показан на рис. 4.

На рисунке Вы
видите и свои ноги, и искусственные. И те, и другие справа и слева от Вас. Вы не
бежите и не идете на своих двоих, а опираетесь на педали, крутите их - а ноги
искусственные повторяют Ваши движения, перебирают сантиметры, опираясь на
поверхность дороги, - велосипед двигается вперед. Он стал внешне другим, однако,
отобразил принятый природой принцип движения. Может быть, войдет в нашу
техническую жизнь, поможет понять и заменит часть прошлых устройств, нами же
созданных.
Cs. 07.02.2003.

P.S. И ещё
одно дополнение. Усовершенствуя велосипед, можно прийти к самому совершенному
механизму - к нашим ногам, к ходьбе ногами, к такому принципу передвижения,
которое принято в природе. Можно получить дубль, синтез живого и механического.
Чтобы выбрать вариант по соответствующей цели. Какое-то приближенное к этому
посмотрите на рис. 5.
Как Вам теперь велосипед?! От
него ничего, кроме зародыша, не осталось.
|
|
Автор Cesiy |